
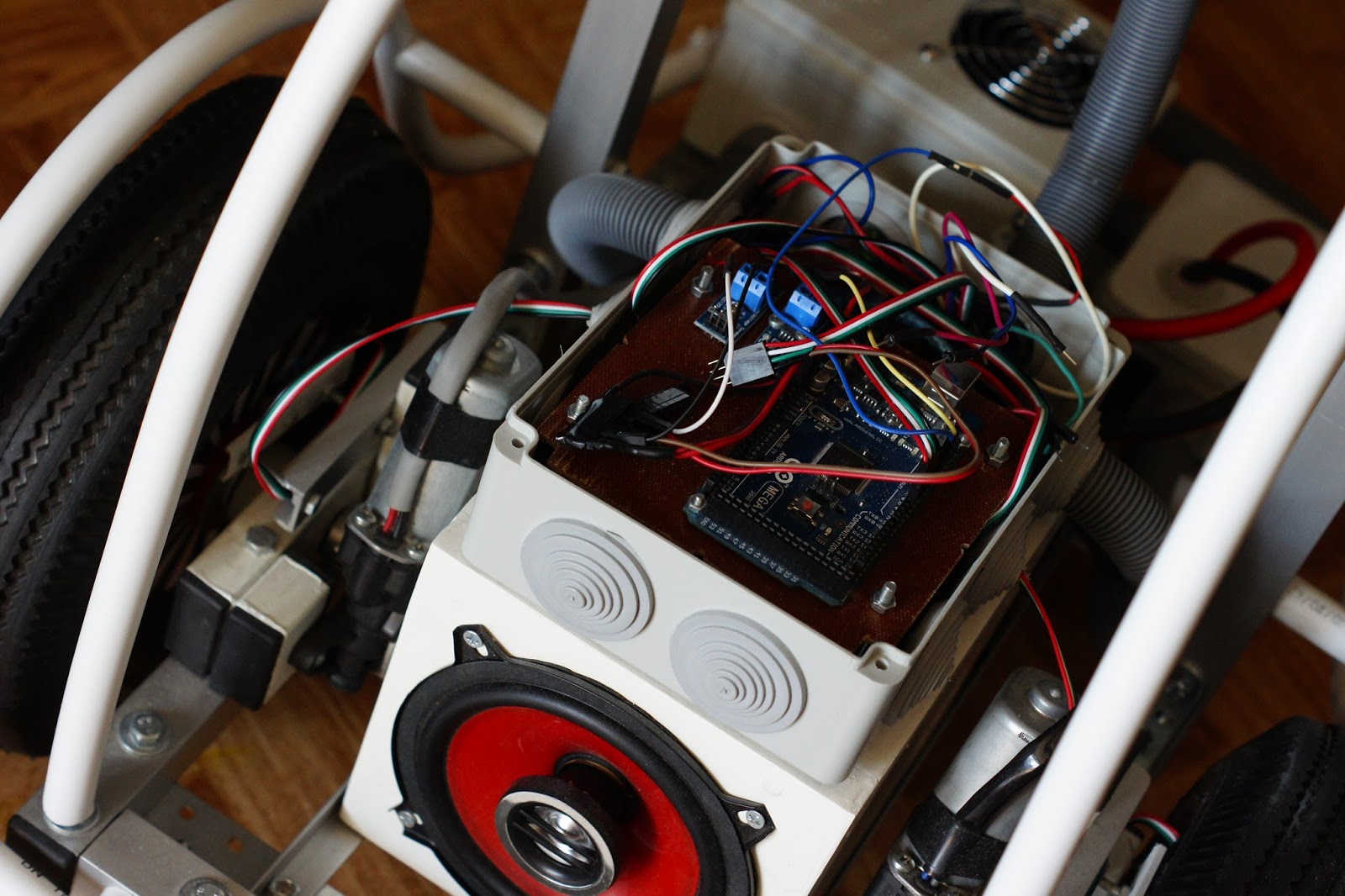
Давненько не было вестей от нашего большого железного робота. Не смотря на плотный график подготовки к соревнованиям (ВРО) работы по проекту все же двигались, хотя и не так быстро, как нам хотелось бы. Вот так вот наш робот выглядит в данный момент:















В процессе работы над дизайном корпуса попробовали использовать технологию "стеклоткань+эпоксидная смола" по болванке, склеенной из пенопласта и монтажной пены, но отказались от нее, корпус выходил слишком "монолитным". Вероятно для конечного устройства это будет неплохим вариантом, но нам пока хочется иметь быстрый доступ к любым компонентам робота. чтобы с удобством в них покопаться.



Первым делом мы установили П-образный каркас, из того же алюминиевого профиля 25x25x2, из которого ранее собирали раму. Крепление каркаса выполнено Г-образными мебельными уголками и болтами М6. В высоту каркас от уровня пола в верхней точке - 65 см.

На каркас смонтировали сервоподвес с двумя степенями свободы, это будущая "шея" робота, этот механизм будет двигать головой. Голову планируем собирать в следующий раз, хотим смонтировать на ней камеру, микрофон, динамик-твиттер и антенны wi-fi.
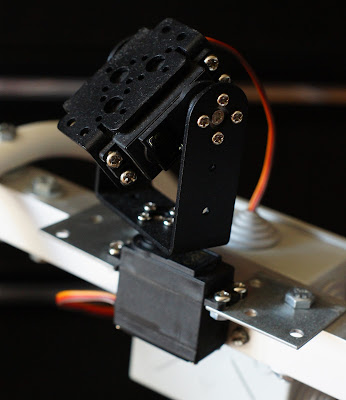


Сервоприводы использовали с металлическими редукторами, MG995.

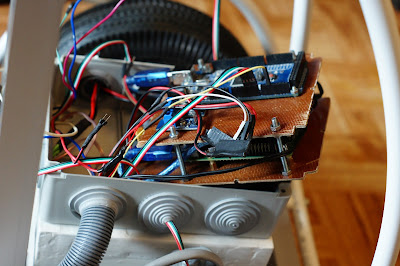
Электронные компоненты решили разделить на группы, разместив их в разных отсеках. Наш робот - учебный, поэтому важно чтобы все в нем было наглядным. Исходя из этого мы выделили следующие 4 группы компонентов:
1) "Силовой отсек" содержит драйверы двигателей, усилитель мощности звука. Об этих штуковинах мы писали в предыдущих частях статьи.



Так как эти компоненты достаточно прилично греются при работе, в отсеке предусмотрели активное охлаждение, программно завязанное на цифровой датчик температуры DS18B20. Вентилятор, управляемый через мосфет IRF530N, включается, когда температура в отсеке превышает 40 градусов и его обороты пропорциональны превышению температуры над этим порогом.




2) "Отсек питания" содержит разводку силового питания, кнопку включения робота, предохранитель.

3) "Мозговой центр" содержит Raspberry Pi 2 и Arduino Mega 2560, соединенные по USB. В Raspberry Pi 2 вставлен Wi-Fi адаптер. Кроме этого здесь мы разместили датчики напряжения и силы тока.


Дял получения стабильных 5В используем преобразователь DC-DC на 5А

Датчик напряжения позволит контролировать заряд батареи, чтобы не допустить слишком сильного ее разряда.

Датчик силы тока ACS712 ACS712ELC-30A позволит контролировать потребление энергии роботом, на основании этих данных можно прогнозировать время, которое он еще сможет проработать, программно снижать токи потребления (замедлять моторы в режим экономии при низком заряде аккумулятора).

4) "Отсек управления сервоприводами". Здесь будут сосредоточены компоненты для управления сервоприводами "шеи" и, возможно, "рук" робота (манипуляторов). Кроме этого здесь планируется разместить электронный компас. Питание сервоприводам будет обеспечивать отдельный DC-DC преобразователь.


Монтажные отсеки соединены гофрированными трубками для проводов (сливной шланг для стиральной машины).


Каркас собран с использованием металлопластиковых труб, болтов и шпилек М6.



В процессе работы над дизайном корпуса попробовали использовать технологию "стеклоткань+эпоксидная смола" по болванке, склеенной из пенопласта и монтажной пены, но отказались от нее, корпус выходил слишком "монолитным". Вероятно для конечного устройства это будет неплохим вариантом, но нам пока хочется иметь быстрый доступ к любым компонентам робота. чтобы с удобством в них покопаться.












а как прграмировать raspberry pi будете? это сложно?
ОтветитьУдалитьКонечно же будем, долгими зимними вечерами! Для этого летом изучали Python по книге «Hello World! Занимательное программирование».
Удалитьпоставьте на робота в качестве головы экран от планшета и подключите его к hdmi на raspberry pi через скалер с алиэкспресс
ОтветитьУдалить