
Машинное зрение использует достаточно ресурсоемкие алгоритмы и, хотя ev3dev на платформе LEGO Mindstorms EV3 и позволяет использовать веб-камеру с библиотеками OpenCV, производительность этой связки оставляет желать лучшего. С целью получения большей вычислительной мощности на борту, но в тоже время не отказываясь от удобных элементов прототипирования, входящих в наборы LEGO, мы решили использовать Raspberry Pi, который будет осуществлять все расчеты, оставляя блоку EV3 задачу низкоуровнего управления двигателями.

В проекте "Следуй за белым кроликом" мы создадим робота, который будет обнаруживать заданный объект и следовать за ним на определенной дистанции, подстраиваясь под скорость его движения. В качестве "кролика", мы будем использовать другого робота, следующего по линии и везущего на себе контрастный предмет, за которым и будет следовать разрабатываемый в рамках проекта робот.

В проекте мы используем Raspberry Pi второй версии. 4 ядра на борту дают возможность распределить по ним задачи:
1) получение потока данных с камеры
2) постобработка изображения и выделение в кадрах искомого объекта, анализ его размера и положения
3) управление двигателями посредством двух ПИД-регуляторов.

Для связи между Raspberry Pi и EV3 можно использовать как проводное подключение через USB (настроив сетевой LAN-интерфейс), так и беспроводную связь через WiFi/Bluetooth. Мы используем пару WiFi-адаптеров, один в EV3, другой в Raspberry Pi. Питание Raspberry Pi получает от повербанка, который робот также везет на себе. Для "удаленного" управления двигателями мы используем библиотеку RPyC (Remote Python Call).

Алгоритм работы робота следующий:
1) Получаем единичный кадр с камеры
2) Анализируем цвет объекта и размер объекта, расположенного по центру кадра, именно за ним мы и будем следовать в дальнейшем
3) запускаем процесс чтения данных с камеры, получая объект в памяти, содержащий в каждый момент времени актуальную картинку
4) циклично анализируем кадр и пытаемся найти на нем искомый объект. Если объект найден - определяем его горизонтальное смещение и изменение размера относительно эталонного
5) передаем процессу с ПИД-регуляторами данные о горизонтальном смещении и отклонении в размере
6) ПИД регуляторы вырабатывают управляющие воздействия, которое суммируются и результат передается подсистеме управления двигателями.
Исходный код робота, следующего за белым кроликом выглядит так:
#!/usr/bin/env python3
import threading
import rpyc
import numpy as np
from imutils.video import WebcamVideoStream
import cv2, time
conn = rpyc.classic.connect('192.168.32.209')
ev3 = conn.modules['ev3dev.ev3']
btn = ev3.Button()
mA = ev3.LargeMotor('outA')
mD = ev3.LargeMotor('outB')
P = 0.2
speed = 0
max = 0
x = 0
dArea = 0
size = 0
cap = WebcamVideoStream(src=0).start()
for i in range(10): frame = cap.read()
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
H = hsv[320,240, 0]
S = hsv[320,240, 1]
V = hsv[320,240, 2]
Lo = np.array([H-35, S-50, V-75])
Hi = np.array([H+35, S+50, V+75])
frame_gray = cv2.inRange(hsv, Lo, Hi)
cv2.imwrite('/var/www/html/kube_search.png', frame_gray)
def motor_control():
global dArea, x, P, size, frame_gray
while True:
if(np.sum(frame_gray) > 10000):
speedA = size*3 - (x*P)
speedD = size*3 + (x*P)
if(speedA > 900): speedA = 900
if(speedA < -900): speedA = -900
if(speedD > 900): speedD = 900
if(speedD < -900): speedD = -900
mA.run_forever(speed_sp=speedA)
mD.run_forever(speed_sp=speedD)
else:
mA.stop(stop_action="brake")
mD.stop(stop_action="brake")
t1 = threading.Thread(target=motor_control)
t1.daemon = True
t1.start()
while True:
frame = cap.read()
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
frame_gray = cv2.inRange(hsv, Lo, Hi)
if(np.sum(frame_gray) > 10000):
moments = cv2.moments(frame_gray, 1)
dM01 = moments['m01']
dM10 = moments['m10']
dArea = moments['m00']
if(max==0): max = dArea
size = 45 - (dArea / max * 100)
if(dArea != 0):
x = 320 - int(dM10 / dArea)
y = 240 - int(dM01 / dArea)
if(x>-10 and x < 10): x = 0
if(size>-5 and size < 5): size = 0
if(btn.backspace):
size = 0
x = 0
break
mA.stop(stop_action="brake")
mD.stop(stop_action="brake")

В проекте "Следуй за белым кроликом" мы создадим робота, который будет обнаруживать заданный объект и следовать за ним на определенной дистанции, подстраиваясь под скорость его движения. В качестве "кролика", мы будем использовать другого робота, следующего по линии и везущего на себе контрастный предмет, за которым и будет следовать разрабатываемый в рамках проекта робот.

1) получение потока данных с камеры
2) постобработка изображения и выделение в кадрах искомого объекта, анализ его размера и положения
3) управление двигателями посредством двух ПИД-регуляторов.
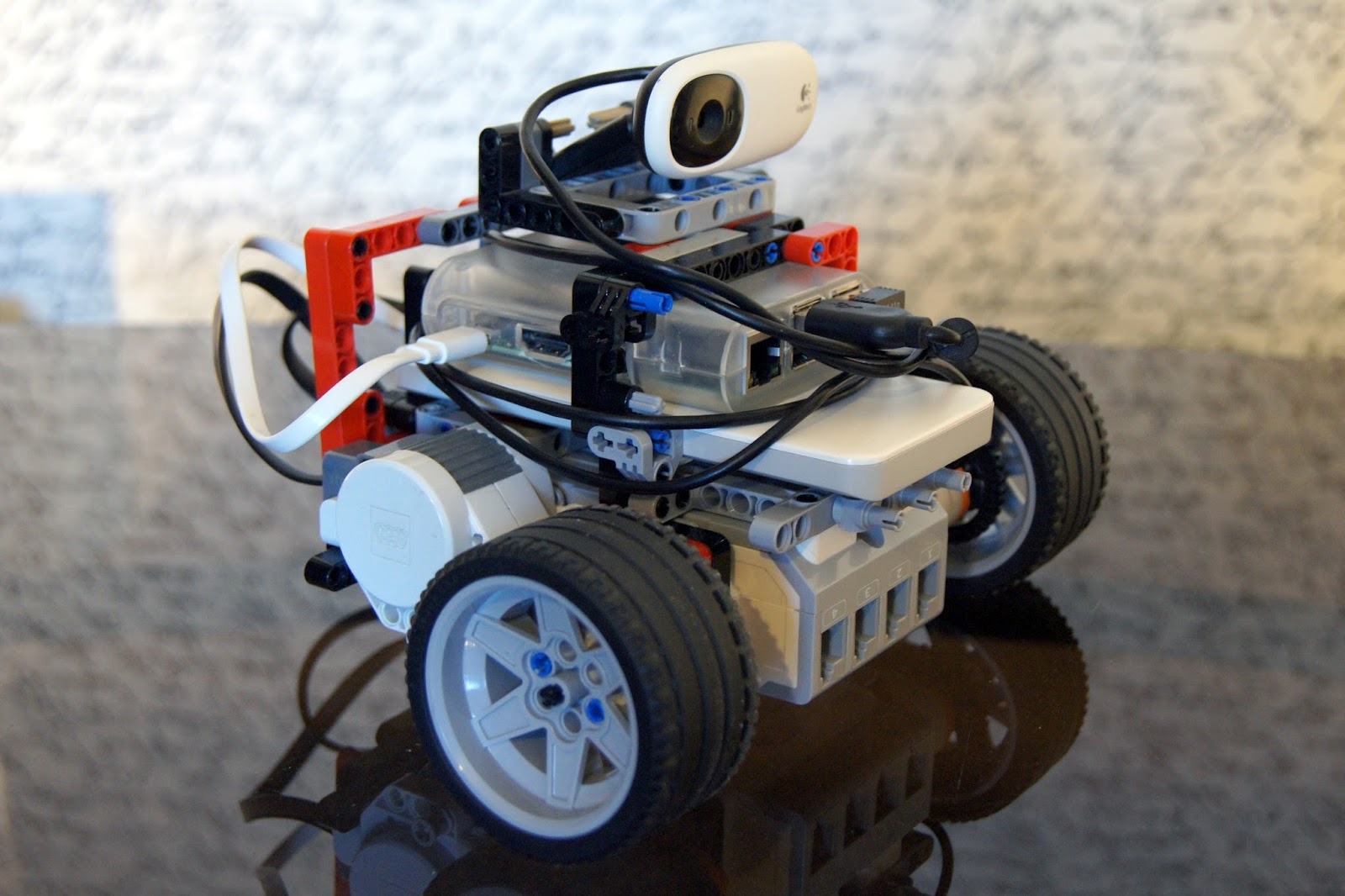
Для связи между Raspberry Pi и EV3 можно использовать как проводное подключение через USB (настроив сетевой LAN-интерфейс), так и беспроводную связь через WiFi/Bluetooth. Мы используем пару WiFi-адаптеров, один в EV3, другой в Raspberry Pi. Питание Raspberry Pi получает от повербанка, который робот также везет на себе. Для "удаленного" управления двигателями мы используем библиотеку RPyC (Remote Python Call).

Алгоритм работы робота следующий:
1) Получаем единичный кадр с камеры
2) Анализируем цвет объекта и размер объекта, расположенного по центру кадра, именно за ним мы и будем следовать в дальнейшем
3) запускаем процесс чтения данных с камеры, получая объект в памяти, содержащий в каждый момент времени актуальную картинку
4) циклично анализируем кадр и пытаемся найти на нем искомый объект. Если объект найден - определяем его горизонтальное смещение и изменение размера относительно эталонного
5) передаем процессу с ПИД-регуляторами данные о горизонтальном смещении и отклонении в размере
6) ПИД регуляторы вырабатывают управляющие воздействия, которое суммируются и результат передается подсистеме управления двигателями.
Исходный код робота, следующего за белым кроликом выглядит так:
#!/usr/bin/env python3
import threading
import rpyc
import numpy as np
from imutils.video import WebcamVideoStream
import cv2, time
conn = rpyc.classic.connect('192.168.32.209')
ev3 = conn.modules['ev3dev.ev3']
btn = ev3.Button()
mA = ev3.LargeMotor('outA')
mD = ev3.LargeMotor('outB')
P = 0.2
speed = 0
max = 0
x = 0
dArea = 0
size = 0
cap = WebcamVideoStream(src=0).start()
for i in range(10): frame = cap.read()
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
H = hsv[320,240, 0]
S = hsv[320,240, 1]
V = hsv[320,240, 2]
Lo = np.array([H-35, S-50, V-75])
Hi = np.array([H+35, S+50, V+75])
frame_gray = cv2.inRange(hsv, Lo, Hi)
cv2.imwrite('/var/www/html/kube_search.png', frame_gray)
def motor_control():
global dArea, x, P, size, frame_gray
while True:
if(np.sum(frame_gray) > 10000):
speedA = size*3 - (x*P)
speedD = size*3 + (x*P)
if(speedA > 900): speedA = 900
if(speedA < -900): speedA = -900
if(speedD > 900): speedD = 900
if(speedD < -900): speedD = -900
mA.run_forever(speed_sp=speedA)
mD.run_forever(speed_sp=speedD)
else:
mA.stop(stop_action="brake")
mD.stop(stop_action="brake")
t1 = threading.Thread(target=motor_control)
t1.daemon = True
t1.start()
while True:
frame = cap.read()
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
frame_gray = cv2.inRange(hsv, Lo, Hi)
if(np.sum(frame_gray) > 10000):
moments = cv2.moments(frame_gray, 1)
dM01 = moments['m01']
dM10 = moments['m10']
dArea = moments['m00']
if(max==0): max = dArea
size = 45 - (dArea / max * 100)
if(dArea != 0):
x = 320 - int(dM10 / dArea)
y = 240 - int(dM01 / dArea)
if(x>-10 and x < 10): x = 0
if(size>-5 and size < 5): size = 0
if(btn.backspace):
size = 0
x = 0
break
mA.stop(stop_action="brake")
mD.stop(stop_action="brake")










Круто, тоже малинку осваиваю
ОтветитьУдалить