Робот, который следовал за белым кроликом в нашем предыдущем проекте, очень захотел научиться так же ловко, как робот-кролик, двигаться вдоль черной линии. Мы решили ему в этом помочь, написав для него программу на Python, использующую камеру и машинное зрение с использованием библиотеки OpenCV.

Чтобы несколько усложнить задачу, мы решили построить дорожный знак и положить на линию условного "лежачего полицейского".

Дорожный знак было решено построить на основе платы Arduino и сервопривода, а управлять им - используя произвольный ИК-пульт дистанционного управления.
Код программы для дорожного знака выглядит следующим образом:
#define ServoPin 5
#include <Servo.h>
#include <IRremote.h>
Servo servo;
int receiverPin = 11;
IRrecv irrecv(receiverPin);
decode_results results;
void setup() {
Serial.begin(9600);
irrecv.enableIRIn();
}
void loop() {
if (irrecv.decode(&results)) {
Serial.println(results.value, HEX);
if(results.value == 0xFF609F){
servo.attach(ServoPin);
servo.write(180);
delay(1000);
servo.detach();
}
if(results.value == 0xFFE01F){
servo.attach(ServoPin);
servo.write(0);
delay(1000);
servo.detach();
}
irrecv.resume();
}
}

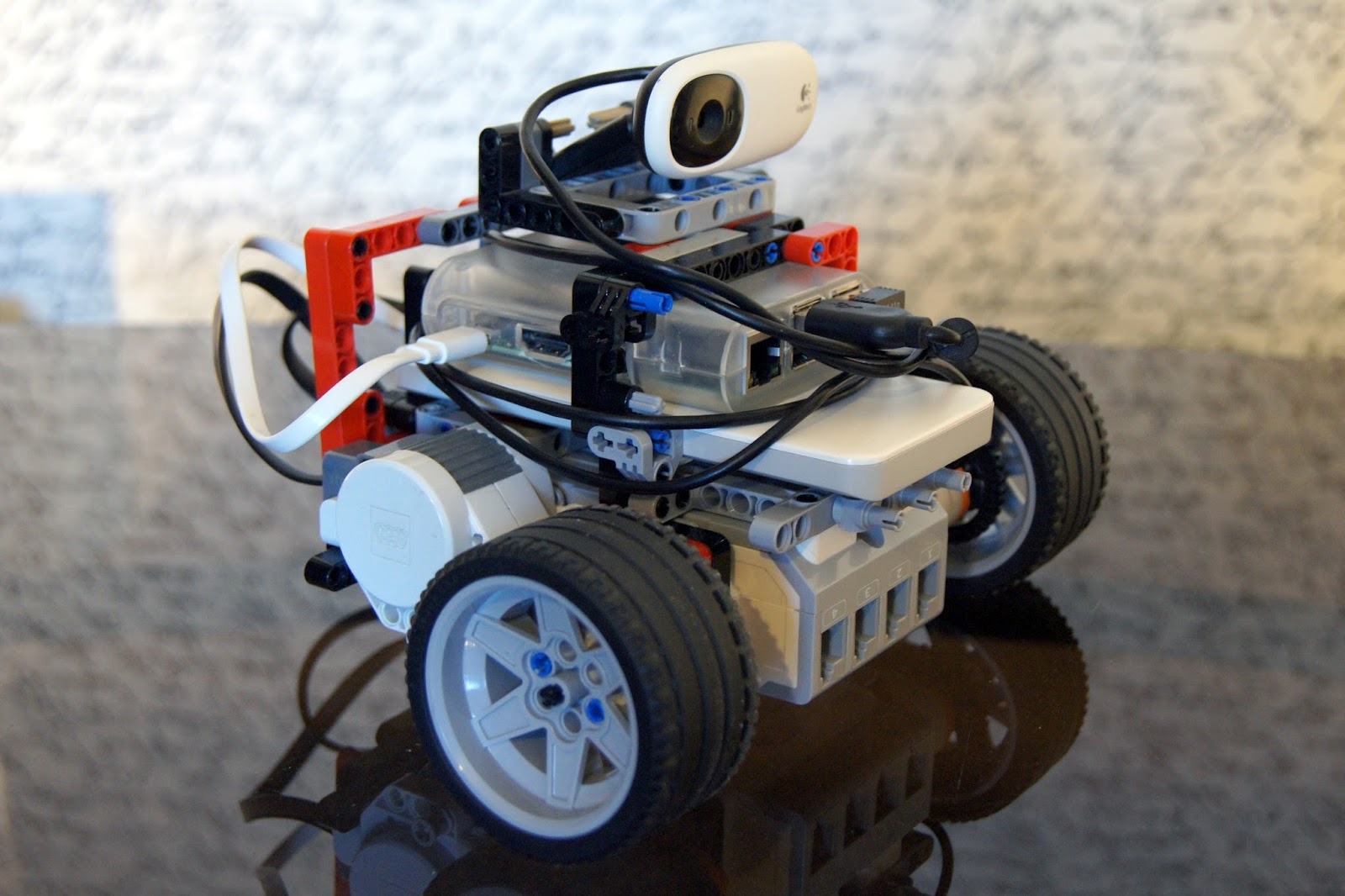
Конструкция робота не претерпела изменений по сравнению с предыдущим проектом, разве что камеру развернули под иным углом, чтобы она видела одновременно и линию перед роботом и пространство рядом с дорогой.

Увидев красный знак, робот должен остановиться и ожидать пока ему будет разрешено двигаться дальше с помощью зеленого знака. "Лежачим полицейским" будет перпендикулярная черной линии синяя полоса. Перед ней робот должен будет снизить скорость.
Алгоритм работы нашего робота таков:

Линию в нижней четверти кадра робот видит так:

А вот так он выделяет в кадре красный знак:

Исходный код программы робота:
#!/usr/bin/env python3
import threading
import rpyc
import numpy as np
from imutils.video import WebcamVideoStream
import cv2, time
conn = rpyc.classic.connect('192.168.32.209')
ev3 = conn.modules['ev3dev.ev3']
btn = ev3.Button()
mA = ev3.LargeMotor('outA')
mD = ev3.LargeMotor('outB')
P = 0.4
D = 1.0
K = 0
speed = 300
speed_go = 0
max = 0
x = 0
es = 0
dArea = 0
size = 0
cap = WebcamVideoStream(src=0).start()
for i in range(10): frame = cap.read()
hsv = cv2.cvtColor(frame[:][360:], cv2.COLOR_BGR2HSV)
frame_gray = cv2.inRange(hsv, (0, 0, 0), (255, 170, 80))
cv2.imwrite('/var/www/html/camera_bot_line.png', frame_gray)
def motor_control():
global x, D, P, frame_gray, speed, es, speed_go
while True:
if(speed_go < speed): speed_go += 50
if(speed_go > speed): speed_go -= 50
if(speed_go < 150):
P = 0.15
D = 0.2
else:
P = 0.4
D = 1.0
if(speed_go < 5):
P = 0
D = 0
else:
P = 0.4
D = 1.0
speedA = speed_go - ((x*P) + D*(x-es))
speedD = speed_go + ((x*P) + D*(x-es))
if(speedA > 900): speedA = 900
if(speedA < -900): speedA = -900
if(speedD > 900): speedD = 900
if(speedD < -900): speedD = -900
mA.run_forever(speed_sp=speedA)
mD.run_forever(speed_sp=speedD)
es = x
t1 = threading.Thread(target=motor_control)
t1.daemon = True
t1.start()
while True:
frame = cap.read()
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
frame_gray = cv2.inRange(hsv[:][360:], (0, 0, 0), (255, 170, 80))
frame_blue = cv2.inRange(hsv[:][240:], (90, 120, 60), (135, 250, 250))
frame_red = cv2.inRange(hsv, (150, 100, 60), (255, 250, 250))
if(np.sum(frame_blue) > 30000):
speed = 100
elif(np.sum(frame_red) > 80000):
speed = 0
else:
speed = 300
moments = cv2.moments(frame_gray, 1)
dM01 = moments['m01']
dM10 = moments['m10']
dArea = moments['m00']
if(dArea != 0):
x = 320 - int(dM10 / dArea)
y = 80 - int(dM01 / dArea)
if(btn.backspace):
speed = 0
speed_go = 0
x = 0
break
mA.stop(stop_action="brake")
mD.stop(stop_action="brake")

Чтобы несколько усложнить задачу, мы решили построить дорожный знак и положить на линию условного "лежачего полицейского".

Дорожный знак было решено построить на основе платы Arduino и сервопривода, а управлять им - используя произвольный ИК-пульт дистанционного управления.
Код программы для дорожного знака выглядит следующим образом:
#define ServoPin 5
#include <Servo.h>
#include <IRremote.h>
Servo servo;
int receiverPin = 11;
IRrecv irrecv(receiverPin);
decode_results results;
void setup() {
Serial.begin(9600);
irrecv.enableIRIn();
}
void loop() {
if (irrecv.decode(&results)) {
Serial.println(results.value, HEX);
if(results.value == 0xFF609F){
servo.attach(ServoPin);
servo.write(180);
delay(1000);
servo.detach();
}
if(results.value == 0xFFE01F){
servo.attach(ServoPin);
servo.write(0);
delay(1000);
servo.detach();
}
irrecv.resume();
}
}

Конструкция робота не претерпела изменений по сравнению с предыдущим проектом, разве что камеру развернули под иным углом, чтобы она видела одновременно и линию перед роботом и пространство рядом с дорогой.

Увидев красный знак, робот должен остановиться и ожидать пока ему будет разрешено двигаться дальше с помощью зеленого знака. "Лежачим полицейским" будет перпендикулярная черной линии синяя полоса. Перед ней робот должен будет снизить скорость.
Алгоритм работы нашего робота таков:
- Запускаем независимый процесс по непрерывному чтению данных с камеры в объект в памяти
- Запускаем независимый процесс по управлению двигателями c использованием ПИД-регулятора
- Запускаем основной процесс, в котором:
- Берем очередной кадр из объекта в памяти, и переводим в цветовое пространство HSV
- Отрезаем от кадра нижнюю четверть кадра и, используя функцию вычисления моментов cv2.moments, вычисляем горизонтальное смещение линии относительно центра
- Передаем данные о смещении относительно линии процессу ПИД-регулятора
- Отрезаем нижнюю половину кадра и анализируем количество "синих" точек в нем. Если их количество превышает заданную границу - сообщаем процессу ПИД-регулятора о снижении скорости движения
- Анализируем количество "красных" точек во всем кадре. Если их количество превышает заданную границу - сообщаем процессу ПИД-регулятора о нулевой скорости движения


А вот так он выделяет в кадре красный знак:

Исходный код программы робота:
#!/usr/bin/env python3
import threading
import rpyc
import numpy as np
from imutils.video import WebcamVideoStream
import cv2, time
conn = rpyc.classic.connect('192.168.32.209')
ev3 = conn.modules['ev3dev.ev3']
btn = ev3.Button()
mA = ev3.LargeMotor('outA')
mD = ev3.LargeMotor('outB')
P = 0.4
D = 1.0
K = 0
speed = 300
speed_go = 0
max = 0
x = 0
es = 0
dArea = 0
size = 0
cap = WebcamVideoStream(src=0).start()
for i in range(10): frame = cap.read()
hsv = cv2.cvtColor(frame[:][360:], cv2.COLOR_BGR2HSV)
frame_gray = cv2.inRange(hsv, (0, 0, 0), (255, 170, 80))
cv2.imwrite('/var/www/html/camera_bot_line.png', frame_gray)
def motor_control():
global x, D, P, frame_gray, speed, es, speed_go
while True:
if(speed_go < speed): speed_go += 50
if(speed_go > speed): speed_go -= 50
if(speed_go < 150):
P = 0.15
D = 0.2
else:
P = 0.4
D = 1.0
if(speed_go < 5):
P = 0
D = 0
else:
P = 0.4
D = 1.0
speedA = speed_go - ((x*P) + D*(x-es))
speedD = speed_go + ((x*P) + D*(x-es))
if(speedA > 900): speedA = 900
if(speedA < -900): speedA = -900
if(speedD > 900): speedD = 900
if(speedD < -900): speedD = -900
mA.run_forever(speed_sp=speedA)
mD.run_forever(speed_sp=speedD)
es = x
t1 = threading.Thread(target=motor_control)
t1.daemon = True
t1.start()
while True:
frame = cap.read()
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
frame_gray = cv2.inRange(hsv[:][360:], (0, 0, 0), (255, 170, 80))
frame_blue = cv2.inRange(hsv[:][240:], (90, 120, 60), (135, 250, 250))
frame_red = cv2.inRange(hsv, (150, 100, 60), (255, 250, 250))
if(np.sum(frame_blue) > 30000):
speed = 100
elif(np.sum(frame_red) > 80000):
speed = 0
else:
speed = 300
moments = cv2.moments(frame_gray, 1)
dM01 = moments['m01']
dM10 = moments['m10']
dArea = moments['m00']
if(dArea != 0):
x = 320 - int(dM10 / dArea)
y = 80 - int(dM01 / dArea)
if(btn.backspace):
speed = 0
speed_go = 0
x = 0
break
mA.stop(stop_action="brake")
mD.stop(stop_action="brake")