В последнее
время наш блог молчит и может показаться,
что «Карандаш и Самоделкин» все, сдулись.
На самом деле работа кипела, а отсутствие
публикуемых материалов было связано с
тем, что проекты раз за разом становятся
все сложнее и требуют все больше времени
на реализацию. Последние наши разработки
были так или иначе связаны с нейросетями,
поэтому логично было за это время
подтянуть скиллы по этой теме, что и
было сделано – был пройден ряд онлайн
курсов по и даже пара оффлайновых, из
которых особенно понравилась «Зимняя
школа машинного обучения» (Machine
Learning
Winter
School).

Проект,
работа над которым шла больше 4 месяцев,
мы назвали Sudoku Hunter. Изначально была идея
собрать робота по мотивам NXTSudokuSolver,
однако постепенно она трансформировалось
в нечто иное, на наш взгляд не менее
интересное.
Итак,
Sudoku Hunter – это пистолет с EV3,
веб-камерой и Raspberry
Pi
на борту, из которого можно «стрелять»
по математическим головоломкам судоку,
получая на экране EV3-блока
их решение. В алгоритмической части
используются технологии машинного
зрения и машинного обучения, веб-технологии
для создания отладочной видеоконсоли.

Если
кто не помнит, судоку - головоломка на
бумаге, игровое поле которой представляет
собой квадрат размером 9×9, разделённый
на меньшие квадраты со стороной в 3
клетки. Таким образом всё игровое поле
состоит из 81 клетки. В них уже в начале
игры стоят некоторые числа (от 1 до 9),
называемые подсказками. От игрока
требуется заполнить свободные клетки
цифрами от 1 до 9 так, чтобы в каждой
строке, в каждом столбце и в каждом малом
квадрате 3×3 каждая цифра встречалась
бы только один раз.

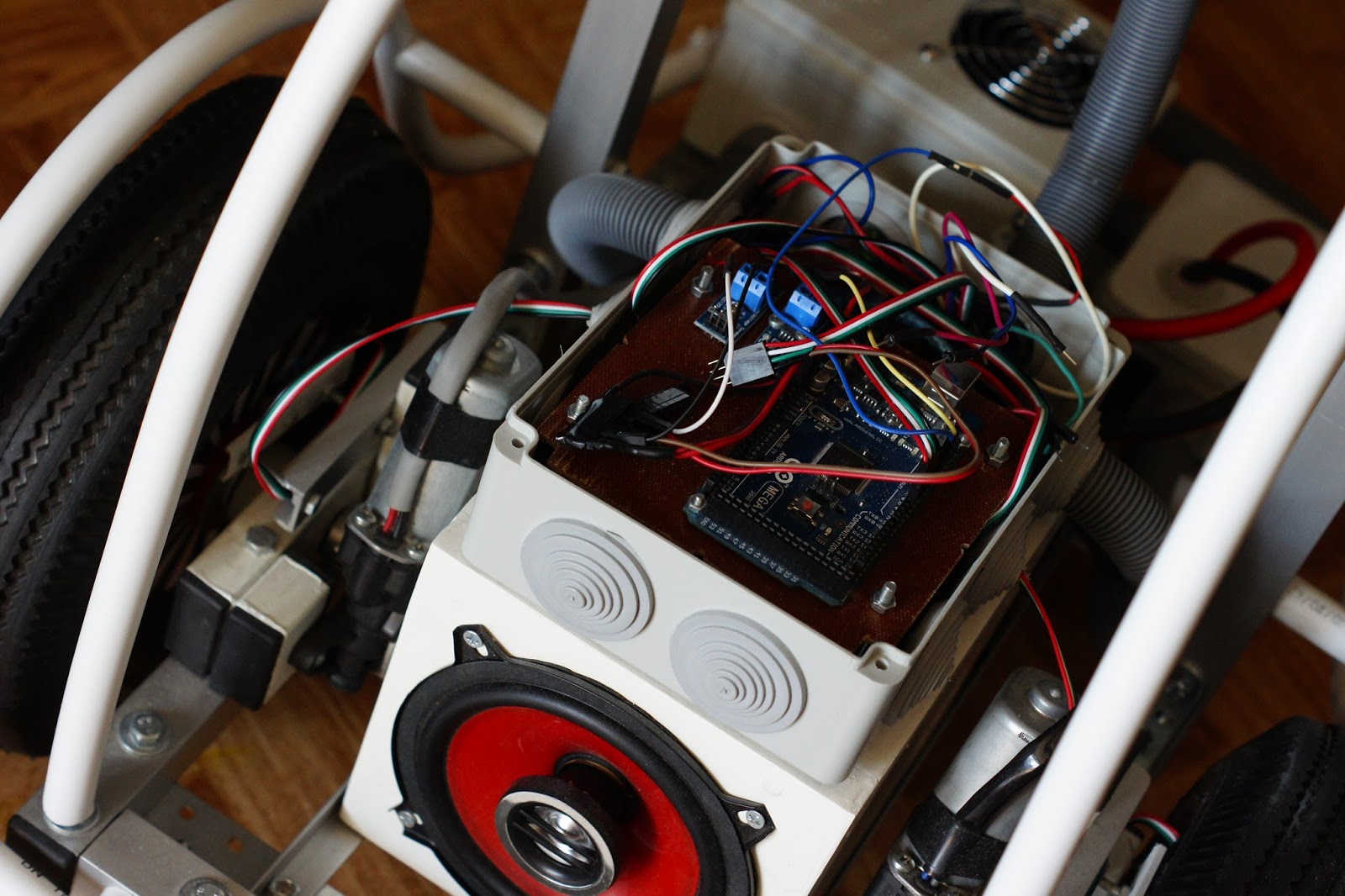
Конструкция
нашего робота не особенно замысловата,
поэтому инструкцию по сборке мы решили не
делать – вы легко соберете что-то
подобное просто глядя на фото. Мы
использовали следующие компоненты:
-
Блок Lego Mindstroms EV3 и строительные детали из этого набора
-
Raspberry Pi
-
Веб-камера Sony Playstation Eye
-
Wi-fi адаптер для связи EV3 с RPi
-
Powerbank для питания RPi

Программ,
которые необходимы для работы робота
- несколько, все они написаны на Python:
-
Программа для EV3 - отвечает за вывод информации на экран блока, связь с Raspberry Pi, передачу на RPi состояния датчика-кнопки
-
Программа для Raspberry Pi - отвечает за обработку кадров с камеры, распознаванием цифр с использованием обученной нейросети, последующим решением распознанного судоку, связь с EV3, вывод вспомогательной и отладочной информации на веб-консоль,
-
Программа для Raspberry Pi, предназначенная для создания дата сета для обучения нейронной сети.
-
Программа для ПК, используется для создания и обучения нейросети на основе подготовленного дата сета

Основная
программа для Raspberry
Pi
работает по следующему алгоритму:
- Подключение библиотеки машинного зрения OpenCV
- Подключение библиотек машинного обучения keras(tensorflow), sklearn
- Взятие кадра с камеры
- Преобразование изображения из BGR в HSV
- Наложение маски для фокусировки на значимых элементах изображения
- Запись результирующего кадра в объект в памяти
- Соединение с EV3 с помощью протокола socket
- Основной цикл:
- Чтение кадра из объекта в памяти
- Поиск в изображении с наложенной маской объектов, напоминающих квадрат
- Передача данных о предполагаемом расположении квадрата на EV3, для вывода на экран блока
- Приём данных с EV3 о состоянии кнопки
- Если кнопка нажата:
- Запуск веб-сервера (используется модуль Flask)
- Соединение с Raspberry Pi с помощью протокола socket
- Получение данных о предполагаемом расположении квадрата
- Подключение библиотеки машинного зрения OpenCV
- Подключение библиотек машинного обучения keras(tensorflow), sklearn
- Взятие кадра с камеры
- Преобразование изображения из BGR в HSV
- Наложение маски для фокусировки на значимых элементах изображения
- Запись результирующего кадра в объект в памяти
- Соединение с EV3 с помощью протокола socket
- Чтение кадра из объекта в памяти
- Поиск в изображении с наложенной маской объектов, напоминающих квадрат
- Передача данных о предполагаемом расположении квадрата на EV3, для вывода на экран блока
- Приём данных с EV3 о состоянии кнопки
- Если кнопка нажата:
- Запуск веб-сервера (используется модуль Flask)
- Вывод информации на веб-сервер - видеоконсоль для удобства отладки
- Подключение библиотек машинного обучения
- Загрузка дата сета изображений
- Разбиение дата сета на учебные и тренировочные данные
- Создание нейронной сети с заданными параметрами
- Обучение нейронной сети
- Сохранение модели
Процесс
2:
-
Изображение обрабатывается и судоку «нарезается» на 81 квадрат в каждом из которых одна клетка головоломки
-
Каждый из фрагментов проверяется на наличие в нём цифры и если цифра обнаружена, то клетка подаётся на распознавание нейронной сети
-
Распознанная цифра заноситься в массив. Когда массив заполнен всеми цифрами, он подаётся в алгоритм, решающий судоку
-
Массив содержащий решённую головоломку передаётся на EV3 для вывода на экран блока
-
Вывод информации на веб-сервер - видеоконсоль для удобства отладки

Программа на
EV3
работает по следующему алгоритму:
-
Вывод контура квадрата на экран для визуального контроля (размер квадрата, угол разворота, степень его трапециевидности)
-
Передача состояния датчика-кнопки на Rpi
-
Если от RPi получен массив данных с решенной головоломкой - вывод решённого судоку на экран блока

Программа
создания дата сета для обучения нейронной
сети на Raspberry
Pi
имеет следующий алгоритм:
Процесс
2:
-
Изображение обрабатывается и судоку «нарезается» на 81 квадрат в каждом из которых одна клетка головоломки
-
Каждый квадрат сохраняется в папку, формируя дата сет
Процесс 3:

Программа
на ПК, предназначенная для создания и
обучения нейросети на основе подготовленного
дата сета работает так:
Стандартный
алгоритм обучения нейронной сети мы
усовершенствовали
путём запуска функции обучения не на
заданное количество
эпох, а по одной эпохе, с проверкой
результата на проверочной выборке после
каждой. Если результат ухудшается
несколько эпох подряд — прекращаем
обучения с ошибкой. Если результаты на
тестовой выборке выше 95% -
прекращаем
обучения, проверяем модель на отдельной
выборке (которую она ещё не видела ни
при обучении,
ни
при проверках после каждой эпохи).
Исходные коды всех программ проекта мы выложили здесь: https://github.com/darkavengersmr/Sudoku-Hunter
Демонстрация работы робота:





























.JPG)